Robot El Yapımı, Combo Biyonik - Biyonik El | Robocombo
Gerekli Olan Parçalar:
1 Adet
Combo Biyonik - Robot El 3D Çıktı Parçaları 11 Adet
SG90 RC Servo Motor 180° Kurulum İçin Gerekli Olan Cıvata Takımı Tornavida Takımı
Not: Combo Biyonik – Robot El Setini Aldığımız Zaman İlk Olarak 3D Çıktı Olan Parçaları Gruplamandırmamız Gerekecektir.
Not: Set İçeriğinde Bulunan SG90 RC Servo Motor 180° Motorları Elimizle Çevirmeye Çalışmayalım. Aksi Takdirde Motor Dişlilerine Zarar Verebilirsiniz.
Adım-1 İlk Adım Olarak Parmakların Montajı İle Başlıyoruz:
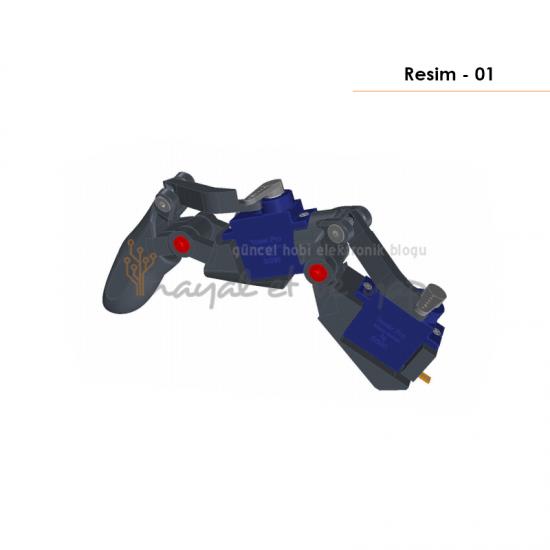
Not: Baş Parmak Montajını En Son Aşamada Yapmanız Gerekecektir. Öncelikle Diğer 4 Parmağın Montajını Yapalım. Parmakları monte etmek için set içeriğinde bulunan M3*20mm vidaları sıkın. Vidaları sonuna kadar sıkmayın, parçaların dönmesine izin verecek sıkın (Parçalar dönebilir ancak hafif bir sürtünme oluşabilir). Motorları Yuvalarına Yerleştirebilmek İçin Motor Paketinin İçinden Çıkan Vidaları Kullanabilirsiniz.

Parmak Montajını Yaptıktan Sonra Motor Bağlantısını Yapmadan Önce Parmakların ve Eklemlerin Rahat Hareket Ettiğini Kontrol Etmeniz Gerekecektir. Parmak ve Eklem Hareketlerinde Sıkıntı Yok İse Motor Montajını Gerçekleştirebilirsiniz.
Adım-2 Parmakların Gövdeye Montajı

Montajı Tamamlanan Parmak ve Eklemlerin Bu Aşamada Gövdeye Yerleştirilmesi Gerekmektedir. Resim – 03’te Orta Kısımda Kırmızı Cıvata ile Gösterilmiş Bölgeye Parmak Kısmı Yerleştirilir ve Alttan Parmaklara Doğru Vidalanır. Burada Altı Düz Olan Eklem Bölgesinden Vidalamanız Gerekecektir.
Adım-3 Baş Parmağın Gövdeye Montajı
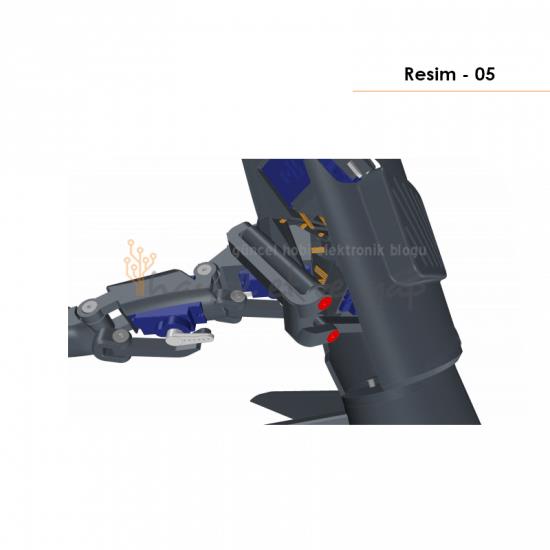
Baş Parmak Montajı İçin Öncelikle İlk Montajını Yaptığımız Parmaklar Gibi Başlıyoruz. Ardından İkinci Eklem Bölgesinin Montajını Yaptıktan Sonra Parmağın İçeriği Doğru Dönmesini Sağlayacak Silindir Kısmının Montajını Gerçekleştirin ve Robot El İşaret Parmağının Altına Vida ile Yerleştirin. Daha Sonra Gövdenin İçine Takılan Motor İle Bağlantısını Yapın.
Adım-4 Üst Gövdenin Montajının Yapılması
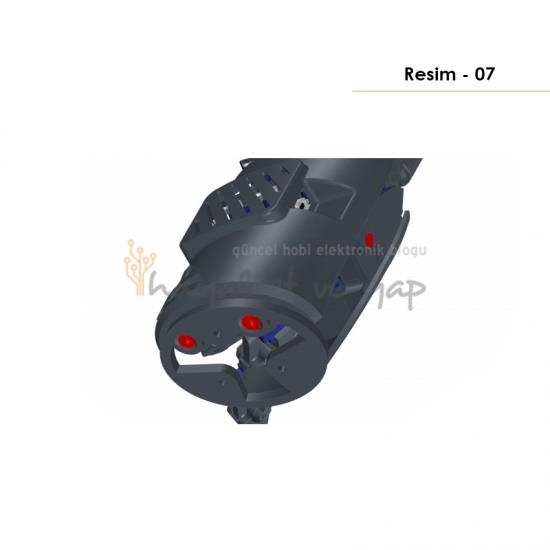

Baş Parmak Montajında Bitirdikten Sonra Resim – 7 ve Resim – 8’de Kırmızı Cıvata ile Gösterildiği Gibi Alt Gövdeye Monte Ediyoruz.
Adım-5 Alt Tabaka Montajı

Son Adımda İse Robot Elimizi Ayakta Tutacak Alt Tablanın Montajını Gerçekleştireceğiz. Alt Tablanın İçinden Robot Elin Üst Gövdesine Doğru 3 Adet Vida ile Montajını Gerçekleştiriyoruz. Montaj İşlemini Tamamlayıp, Kodlamasına Geçtiğiniz Zaman Motorlara Ayarlama Yapmanız Gerekmektedir. Bu Ayarlamayı Yaparken Motor Bağlantılarını Söküp Motorun Bulunması Gerektiği Pozisyonu Tam Ayarlayıp, Motor Bağlantılarını Yapıp Kod Yükledikten Sonra Robot Eliniz Tam Olarak Çalışmaya Hazırdır. Saygılarımızla.
#include <Servo.h>
Servo myservo2; //index
Servo myservo3; //index
Servo myservo4; //middle
Servo myservo5; //middle
Servo myservo6; //ring
Servo myservo7; //ring
Servo myservo8; //pinky
Servo myservo9; //pinky
Servo myservo10; //thumb
Servo myservo11; //thumb
Servo myservo12; //rotation
void setup() {
myservo2.attach(2);
myservo3.attach(3);
myservo4.attach(4);
myservo5.attach(5);
myservo6.attach(6);
myservo7.attach(7);
myservo8.attach(8);
myservo9.attach(9);
myservo10.attach(10);
myservo11.attach(11);
myservo12.attach(12);
}
void loop() {
//Open
myservo10.write(90);
delay(200);
myservo11.write(90);
delay(200);
myservo2.write(180);
delay(200);
myservo3.write(180);
delay(200);
myservo4.write(180);
delay(200);
myservo5.write(180);
delay(200);
myservo6.write(180);
delay(200);
myservo7.write(180);
delay(200);
myservo8.write(180);
delay(200);
myservo9.write(180);
delay(200);
delay(1000);
//Close
myservo8.write(0);
delay(200);
myservo9.write(0);
delay(200);
myservo6.write(0);
delay(200);
myservo7.write(0);
delay(200);
myservo4.write(0);
delay(200);
myservo5.write(0);
delay(200);
myservo2.write(0);
delay(200);
myservo3.write(0);
delay(200);
myservo12.write(180);
delay(200);
myservo10.write(80);
delay(200);
myservo11.write(10);
delay(200);
delay(1000);
//Open
myservo10.write(90);
delay(200);
myservo11.write(90);
delay(200);
myservo2.write(180);
delay(200);
myservo3.write(180);
delay(200);
myservo4.write(180);
delay(200);
myservo5.write(180);
delay(200);
myservo6.write(180);
delay(200);
myservo7.write(180);
delay(200);
myservo8.write(180);
delay(200);
myservo9.write(180);
delay(200);
delay(1000);
//Test Joint
myservo2.write(30);
myservo4.write(30);
myservo6.write(30);
myservo8.write(30);
myservo10.write(30);
delay(500);
myservo2.write(180);
myservo4.write(180);
myservo6.write(180);
myservo8.write(180);
myservo10.write(180);
delay(500);
myservo3.write(0);
myservo5.write(0);
myservo7.write(0);
myservo9.write(0);
myservo11.write(0);
delay(500);
myservo3.write(180);
myservo5.write(180);
myservo7.write(180);
myservo9.write(180);
myservo11.write(180);
delay(1000);
//Wave
myservo8.write(0);
delay(350);
myservo9.write(0);
myservo6.write(0);
delay(350);
myservo7.write(0);
myservo4.write(0);
delay(350);
myservo5.write(0);
myservo2.write(0);
delay(350);
myservo3.write(0);
myservo8.write(180);
delay(350);
myservo9.write(180);
myservo6.write(180);
delay(350);
myservo7.write(180);
myservo4.write(180);
delay(350);
myservo5.write(180);
myservo2.write(180);
delay(350);
myservo3.write(180);
delay(1000);
//Pinch
myservo12.write(180);
myservo4.write(0);
myservo5.write(0);
myservo6.write(0);
myservo7.write(0);
myservo8.write(0);
myservo9.write(0);
delay(1000);
myservo2.write(30);
myservo3.write(135);
myservo10.write(80);
myservo11.write(90);
delay(1000);
myservo2.write(85);
delay(500);
myservo3.write(25);
myservo11.write(20);
delay(1000);
//Open
myservo10.write(90);
delay(200);
myservo11.write(90);
delay(200);
myservo2.write(180);
delay(200);
myservo3.write(180);
delay(200);
myservo4.write(180);
delay(200);
myservo5.write(180);
delay(200);
myservo6.write(180);
delay(200);
myservo7.write(180);
delay(200);
myservo8.write(180);
delay(200);
myservo9.write(180);
delay(200);
delay(1000);
//Thumb, Index and Middle
myservo12.write(180);
delay(500);
myservo2.write(65);
myservo3.write(65);
myservo10.write(80);
myservo11.write(65);
delay(1000);
myservo2.write(180);
myservo3.write(180);
myservo10.write(180);
myservo11.write(180);
delay(500);
myservo4.write(95);
myservo5.write(30);
myservo10.write(55);
myservo11.write(65);
delay(1000);
}
#include <Servo.h>
Servo myservo2; //index
Servo myservo3; //index
Servo myservo4; //middle
Servo myservo5; //middle
Servo myservo6; //ring
Servo myservo7; //ring
Servo myservo8; //pinky
Servo myservo9; //pinky
Servo myservo10; //thumb
Servo myservo11; //thumb
Servo myservo12; //rotation
void setup() {
myservo2.attach(2);
myservo3.attach(3);
myservo4.attach(4);
myservo5.attach(5);
myservo6.attach(6);
myservo7.attach(7);
myservo8.attach(8);
myservo9.attach(9);
myservo10.attach(10);
myservo11.attach(11);
myservo12.attach(12);
}
void loop() {
//Open
myservo10.write(90);
delay(200);
myservo11.write(90);
delay(200);
myservo2.write(180);
delay(200);
myservo3.write(180);
delay(200);
myservo4.write(180);
delay(200);
myservo5.write(180);
delay(200);
myservo6.write(180);
delay(200);
myservo7.write(180);
delay(200);
myservo8.write(180);
delay(200);
myservo9.write(180);
delay(200);
delay(1000);
//Close
myservo8.write(0);
delay(200);
myservo9.write(0);
delay(200);
myservo6.write(0);
delay(200);
myservo7.write(0);
delay(200);
myservo4.write(0);
delay(200);
myservo5.write(0);
delay(200);
myservo2.write(0);
delay(200);
myservo3.write(0);
delay(200);
myservo12.write(180);
delay(200);
myservo10.write(80);
delay(200);
myservo11.write(10);
delay(200);
delay(1000);
//Open
myservo10.write(90);
delay(200);
myservo11.write(90);
delay(200);
myservo2.write(180);
delay(200);
myservo3.write(180);
delay(200);
myservo4.write(180);
delay(200);
myservo5.write(180);
delay(200);
myservo6.write(180);
delay(200);
myservo7.write(180);
delay(200);
myservo8.write(180);
delay(200);
myservo9.write(180);
delay(200);
delay(1000);
//Test Joint
myservo2.write(30);
myservo4.write(30);
myservo6.write(30);
myservo8.write(30);
myservo10.write(30);
delay(500);
myservo2.write(180);
myservo4.write(180);
myservo6.write(180);
myservo8.write(180);
myservo10.write(180);
delay(500);
myservo3.write(0);
myservo5.write(0);
myservo7.write(0);
myservo9.write(0);
myservo11.write(0);
delay(500);
myservo3.write(180);
myservo5.write(180);
myservo7.write(180);
myservo9.write(180);
myservo11.write(180);
delay(1000);
//Wave
myservo8.write(0);
delay(350);
myservo9.write(0);
myservo6.write(0);
delay(350);
myservo7.write(0);
myservo4.write(0);
delay(350);
myservo5.write(0);
myservo2.write(0);
delay(350);
myservo3.write(0);
myservo8.write(180);
delay(350);
myservo9.write(180);
myservo6.write(180);
delay(350);
myservo7.write(180);
myservo4.write(180);
delay(350);
myservo5.write(180);
myservo2.write(180);
delay(350);
myservo3.write(180);
delay(1000);
//Pinch
myservo12.write(180);
myservo4.write(0);
myservo5.write(0);
myservo6.write(0);
myservo7.write(0);
myservo8.write(0);
myservo9.write(0);
delay(1000);
myservo2.write(30);
myservo3.write(135);
myservo10.write(80);
myservo11.write(90);
delay(1000);
myservo2.write(85);
delay(500);
myservo3.write(25);
myservo11.write(20);
delay(1000);
//Open
myservo10.write(90);
delay(200);
myservo11.write(90);
delay(200);
myservo2.write(180);
delay(200);
myservo3.write(180);
delay(200);
myservo4.write(180);
delay(200);
myservo5.write(180);
delay(200);
myservo6.write(180);
delay(200);
myservo7.write(180);
delay(200);
myservo8.write(180);
delay(200);
myservo9.write(180);
delay(200);
delay(1000);
//Thumb, Index and Middle
myservo12.write(180);
delay(500);
myservo2.write(65);
myservo3.write(65);
myservo10.write(80);
myservo11.write(65);
delay(1000);
myservo2.write(180);
myservo3.write(180);
myservo10.write(180);
myservo11.write(180);
delay(500);
myservo4.write(95);
myservo5.write(30);
myservo10.write(55);
myservo11.write(65);
delay(1000);
}
Etiketler: Robot El Yapımı, Combo Biyonik - Biyonik El
Ekim 24, 2021
Listeye dön